

Garmin anuncia novo ciclo beta e atualização para o recente smartwatch

A Garmin anunciou uma nova atualização beta para o mais novo smartwatch Forerunner 165. Esta é a primeira versão do ciclo de testes 20.xx, sendo que o ciclo 19.xx foi concluído há alguns meses com uma atualização estável.
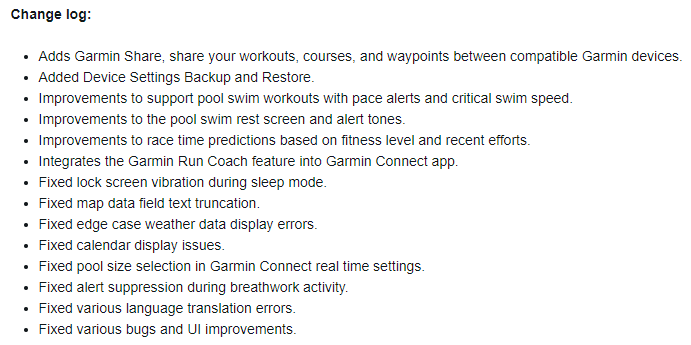
A versão beta 20.15 adiciona o Garmin Share ao Forerunner 165. Esse recurso permite que o usuário compartilhe seus exercícios, percursos e waypoints com outros dispositivos ou usuários Garmin. Há também uma nova função de backup e restauração das configurações do dispositivo, além de melhorias nas previsões de tempo de corrida e na atividade de natação na piscina. Além disso, o Run Coach da Garmin agora pode ser sincronizado com o aplicativo Garmin Connect. Há uma série de correções de bugs para o modo de suspensão, erros de exibição de dados, calendário e traduções. Como de costume, a empresa pede aos usuários que relatem quaisquer novos bugs que encontrarem ao testar a atualização beta na seção de relatórios de bugs do fórum.
De acordo com a equipe da Garmin, a atualização será lançada em fases. No entanto, as datas estimadas de início e término do lançamento ainda não foram anunciadas. Quando ela estiver disponível no smartwatch Forerunner 165, o usuário poderá fazer o download da atualização acessando o menu principal > Configurações > Sistema > Atualização de software > Verificar atualizações. Além disso, o senhor pode participar do Programa Beta por meio do Garmin Connect.
Fonte(s)












